Mobil gravimetri, hareketli platformlarla (kara, hava veya deniz aracı) gravite büyüklüğünü ölçme işlemine verilen genel bir isimdir. Mobil gravimetrinin temeli, ataletsel veya inersiyal sistemde Newton’un ikinci hareket yasasına dayanmaktadır. İnersiyal sistemde  hareketli cismin kinematik ivmesi
hareketli cismin kinematik ivmesi  , cisim üzerindeki spesifik kuvvet
, cisim üzerindeki spesifik kuvvet  ve gravite vektörünün
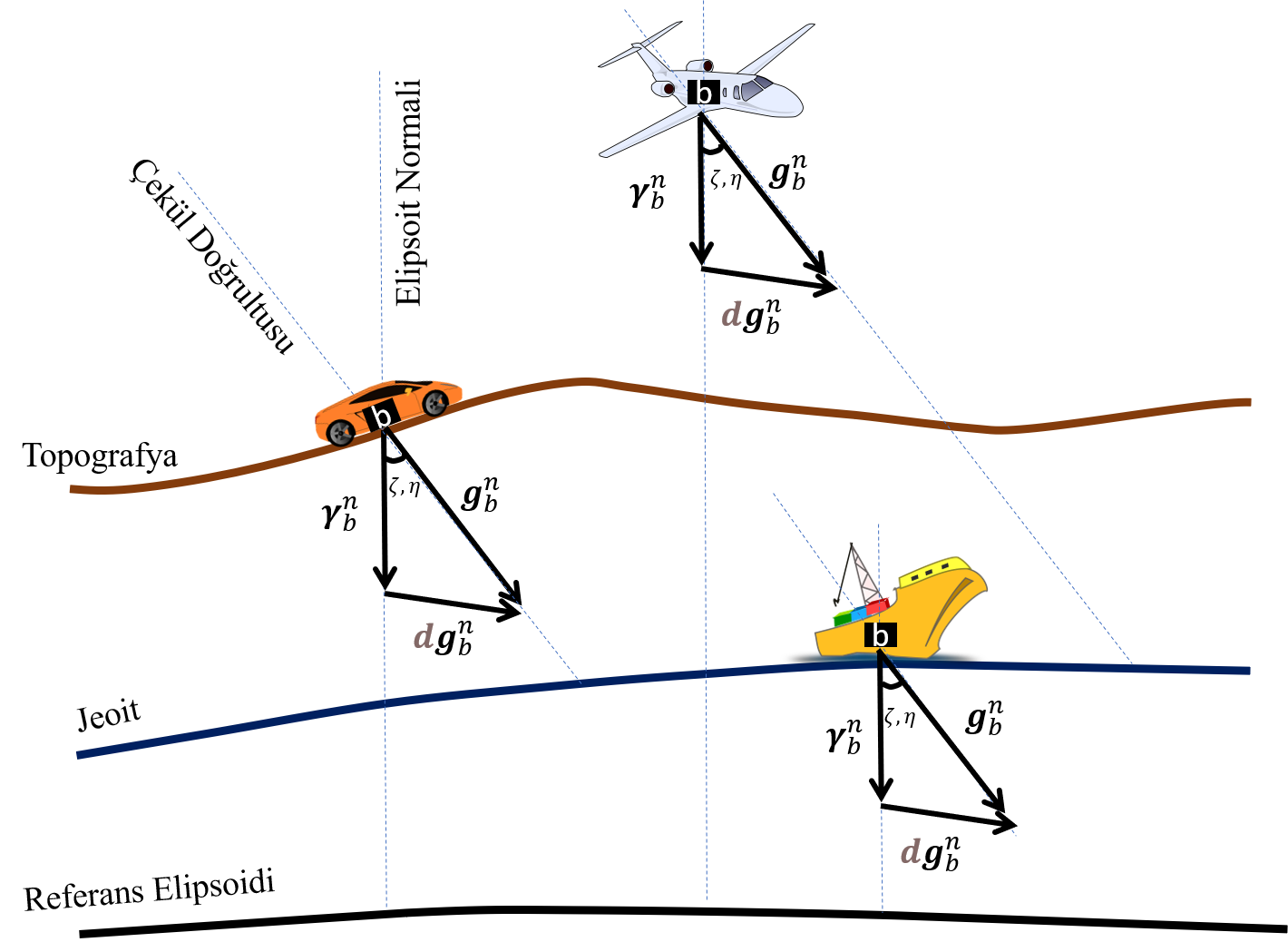
ve gravite vektörünün  toplamına eşittir. Dolayısıyla cisme etki eden gravite ivmesi, (1) eşitliğinde gösterildiği şekilde kinematik ivme ile spesifik kuvvetin farkı olarak ifade edilebilmektedir.
toplamına eşittir. Dolayısıyla cisme etki eden gravite ivmesi, (1) eşitliğinde gösterildiği şekilde kinematik ivme ile spesifik kuvvetin farkı olarak ifade edilebilmektedir.

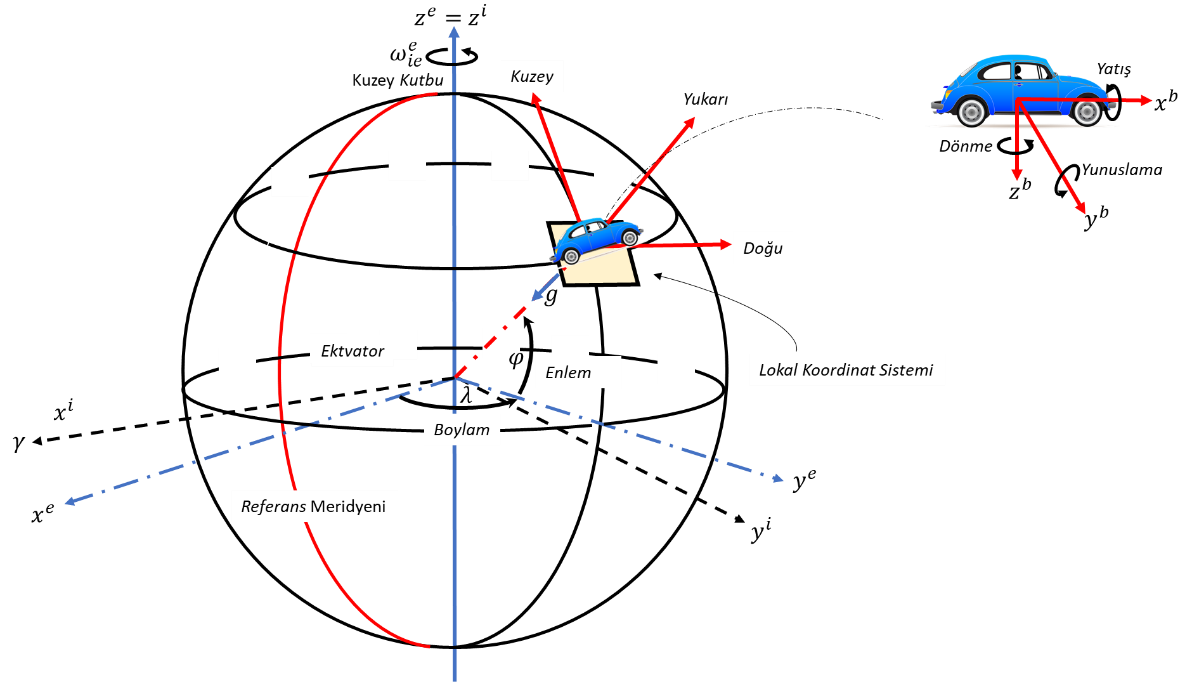
Hareketli cismin kinematik ivmesi, GNSS ile elde edilen konum vektörünün ikinci türevidir. Hareketli cisim üzerindeki spesifik kuvvet ise IMU ivmeölçer üçlüleri ile ölçülmektedir. Mobil platformun gövde referans çerçevesinin inersiyal sisteme göre dönüş hızları yine IMU içerisindeki jiroskop üçlüleri ile ölçülebilmektedir. Yer’in inersiyal sisteme göre dönüklüğü ve yer dönme hızı, lokal toposentrik referans çerçevesinin yer merkezli yer sabit referans çerçevesine göre dönüş hızı, IMU gövde referans çerçevesinin lokal toposentrik referans çerçevesine göre dönüş hızı ve mobil platfom üzerindeki Coriolis kuvvetleri dikkate alınarak, IMU/GNSS entegrasyonu ile lokal toposentrik referans çerçevesinde gravite bozukluğu vektörünü belirlemek mümkündür.

Harita Genel Müdürlüğü envanterindeki iCORUS isimli ataletsel navigasyon sistemi ile 2019 yılından itibaren ülkemizde hava ve kara mobil gravimetri uygulamaları gerçekleştirilmeye başlamıştır.

Kaynaklar:
1. Akpınar İ. (2022) SIMU ve GNSS Ölçülerinin Entegrasyonuna Dayalı Mobil Yersel Gravimetri, Yüksek Lisans Tezi, Hacettepe Üniversitesi, Ankara.
2. Simav M. (2021) Analitik Ataletsel Navigasyon ve Küresel Navigasyon Uydu Sistemleri Entegrasyonuna Dayalı Hava Gravimetrisi: Türkiye’de İlk Uygulamalar, Harita Dergisi, 165, 1-16.
3. HGM (2021) Türkiye Yükseklik Sisteminin Modernizasyonu ve Gravite Altyapısının İyileştirilmesi Projesi 2015K090710 (2015K09-2464) Proje Tamamlama Raporu, Mart 2021, Harita Genel Müdürlüğü, Ankara.